De zelfrijdende auto
Een zelfrijdende auto is een voertuig dat kan rijden zonder menselijke tussenkomst, en dit dankzij een boordcomputer die informatie verzamelt door middel van geavanceerde technologieën. Zoals:
- Een laserradar op het dak die de omgeving van het voertuig scant over een perimeter van ongeveer 60 meter om er een 3D-kaart van te maken.
- Camera's, sensoren, radars en lidars aan de achterkant en voorkant van het voertuig, om de aanwezigheid van borden, verkeerslichten, markeringen op de grond, voetgangers, fietsers, enz. te detecteren.
- Een gps die de exacte positie van het voertuig berekent.
- Een hodometer, een kilometerteller die het afgelegde traject van de auto meet.
Daarbij komt nog de informatie die de slimme auto ontvangt door te communiceren met de omliggende voertuigen, (C2C, car-to-car), met zijn omgeving (C2E, car-to-environment). bijv.: slimme steden) en met elke andere verbonden infrastructuur (C2X, car-to-everything). Dankzij al deze gegevens kan de boordcomputer, die vaak een vorm van kunstmatige intelligentie (AI) bevat, het rijgedrag helemaal alleen beheren.
6 automatiseringsniveaus
Op onze wegen rijden al auto‘s die deels zelfrijdend zijn. Denk maar aan de voertuigen die zijn uitgerust met een adaptatieve snelheidsregelaar, parkeerhulp of automatische remmen.
Om hier meer duidelijkheid in te brengen, maken de constructeurs onderscheid tussen 6 automatiseringsniveaus:
- Te beginnen met niveau 0, waarbij het beheer van de auto volledig aan de bestuurder wordt overgelaten.
- Bij niveau 1 is de rijbijstand beperkt tot een paar functies (snelheidsregeling, bijvoorbeeld).
- Op niveau 2 kan de bestuurder zijn stuur en de pedalen loslaten, maar hij moet op elk ogenblik paraat zijn om de controle weer over te nemen. Hier kan de wagen een aantal specifieke manoeuvres zelf uitvoeren, bv. inparkeren.
- Een auto van niveau 3 kan zelfstandig rijden in optimale omstandigheden, zoals op autosnelwegen. In de stad rijden, of adequaat reageren in noodsituaties, is eindeloos veel complexer en vereist de tussenkomst van de bestuurder.
- Een auto van niveau 4 neemt op elk type weg de beslissingen alleen. De bestuurder kan zich met iets anders bezighouden onderweg. Bepaalde situaties echter (moeilijke weersomstandigheden, bijvoorbeeld) vereisen de tussenkomst van de bestuurder.
- Op niveau 5 ten slotte rijdt het voertuig helemaal alleen. Het is pas in dit niveau dat stuur en pedalen overboord kunnen worden gegooid.
De constructeurs beginnen al "testmodellen" van niveau 4 voor te stellen (nog niet te koop op de markt). Hun ultieme doel is uiteraard om niveau 5 te bereiken.

Men gaat ervan uit dat de ontwikkeling van dergelijke auto's zeer nuttig zal zijn, met name op het vlak van verkeersveiligheid, maar ook aanzienlijke besparingen zal opleveren voor de samenleving.
Minder dodelijke ongevallen
Elk jaar tellen we wereldwijd 1,3 miljoen mensen die sterven op de wegen. In België gebeurden in 2019 meer dan 35 000 ongevallen. Het aantal doden binnen de 30 dagen na het ongeval is echter met 7% gestegen. De stijging wordt volledig verklaard door de stijging van het aantal doden ter plaatse van 437 in 2018 tot 483 in 2019 (+10,5%).
90% van de ongevallen wordt veroorzaakt door menselijke fouten, waarvan 10% door dronken bestuurders. Vele levens zouden dus kunnen worden gered als we de menselijke factor kunnen uitschakelen en de controle overdragen aan computers, die betrouwbaarder zijn dan de mens.
Geldbesparingen
Het gebruik van zelfrijdende auto‘s op onze wegen zou de samenleving dus veel geld kunnen opleveren, met name dankzij:
- minder verkeersongevallen (minder schade, lagere verzekeringstarieven, enz.);
- minder verkeersopstoppingen (vlotter verkeer dankzij de communicatie tussen voertuigen en een beter beheer van de ruimte);
- minder brandstof die verloren gaat in files;
- de uiteindelijke uitschakeling van verkeerslichten, enz.
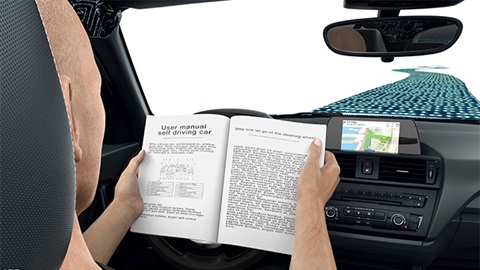
Meer comfort en ontspanning
De bestuurders van hun kant zijn niet meer gebonden aan hun stuur, zouden zich met andere zaken kunnen bezighouden: een dossier of boek lezen, zich bezighouden met de kinderen, hun e-mails checken, een filmpje bekijken of zelfs een dutje doen.
Een volledige automatisering van de voertuigen, dat is niet voor meteen. Er resten nog tal van uitdagingen, met name voor de autosector, maar ook voor de regeringen die de van kracht zijnde reglementen moeten aanpassen. En de komst van deze voertuigen brengt nog andere obstakels, divers en complex, met zich mee.
Technische gebreken
Steeds meer constructeurs leggen zich toe op de ontwikkeling van prototypes van zelfrijdende auto's, maar slechts weinigen van hen zijn echt klaar om in het verkeer te komen en 100% veiligheid te garanderen. Zo zijn meer geavanceerde sensoren noodzakelijk op de auto om een nauwkeurigere 3D-kaart te krijgen. Ook de software staat nog niet helemaal op punt, want kan nog geen rekening houden met alle mogelijke scenario's. Er duiken in de media met de regelmaat van de klok items op over autonome systemen die al dan niet een rol spelen bij (dodelijke) ongevallen. In 2020 nog wees het Federaal Veiligheidsangentschap in Verenigde Staten naar de automatische piloot als (mede-) aanleiding voor een dodelijk ongeval uit 2018.
Aansprakelijkheid en betrouwbaarheid
Maar dergelijke ongevallen dwingen ons ook om na te denken over de aansprakelijkheid. Wie is verantwoordelijk als zich een ongeval voordoet? De eigenaar van het voertuig? De constructeur? De ontwikkelaar van de software? Dat is nog niet uitgeklaard. En hoe zit het met het risico dat die rijdende computers worden gehackt? Op dit ogenblik is het computerbeveiligingssysteem aan boord van zelfrijdende auto‘s niet 100% betrouwbaar. Hackers kunnen dus gemakkelijk de controle overnemen.
Reglementen
Momenteel specificeren de Europese teksten dat een bestuurder te allen tijde de controle moet behouden over zijn auto. Nog een obstakel dat vooruitgang in dit domein tegenhoudt.
Ontbrekende infrastructuur
De regeringen moeten ook meer investeren om de ontwikkeling van slimme verkeersinfrastructuur, noodzakelijk voor het verkeer met zelfrijdende auto‘s, te versnellen (5G veralgemeend, bijvoorbeeld).
Privacy
Bovendien hebben de computers zeer veel informatie nodig om de controle over het voertuig te kunnen overnemen. Dit betekent dat de inzittenden hun persoonlijke gegevens moeten delen met de computers. Bovendien filmen en registreren de camera's die de omgeving van de auto op elk ogenblik scannen, het komen en gaan van veel voetgangers en auto's in de openbare ruimte. Het is dus niet moeilijk te begrijpen dat sommige mensen eerder terughoudend zijn om in een ultrabewaakte context te leven.
Mentaliteit
Zich ontdoen van de stress achter het stuur is een zeer aantrekkelijk vooruitzicht voor veel weggebruikers. Toch is niet iedereen bereid om de controle over zijn voertuig af te staan en zijn leven toe te vertrouwen aan een robot. Een mentaliteitsverandering is dus nodig, terwijl het ook minstens 10 jaar zal duren om de huidige vloot voertuigen te vervangen.
Lees hier hoe steeds meer rijhulpsystemen worden toegepast en hoe ze de veiligheid verhogen.
Tesla Model 3
Misschien het meest tot de verbeelding sprekend in het domein van zelfstandig rijden: de autopilot van Tesla. Bij Tesla maken ze zich sterk dat de huidige wagens -dus élke Tesla- reeds alle hardware bevatten die nodig is om de auto volledig autonoom te laten rijden. Acht camera’s, aangevuld met een batterij ultrasone sensoren, zorgen voor 250 meter ver zicht. Een radar geeft data door over de omgeving voor en rond de wagen, zelfs in slechte weersomstandigheden. Een onboard computer (volgens Tesla 40 keer krachtiger dan de vorige generatie) verwerkt die datastroom.
Echter: tests lopen nog volop en de huidige obstakels (zie eerder) weerhouden Tesla ervan om die functionaliteit daadwerkelijk (helemaal) te gebruiken. Eens die obstakels zijn weggewerkt zullen deze nieuwe functies geleidelijk aan worden geactiveerd via over-the-air software updates.

Chrysler Portal Concept
De Amerikaanse constructeur Chrysler heeft zijn eerste zelfrijdende auto ontwikkeld, de Chrysler Portal. Het voertuig maakt gebruik van de Waymo-technologie (ex-Google-car) en is uitgerust met camera's, laserradars, sonars en obstakelsensoren. De wagen is volledig elektrisch en kan 400 km rijden zonder opgelaten te worden. Dit zelfrijdende voertuig van niveau 3 (semi-autonome functies), ultrageconnecteerd, wordt beschouwd als een derde leefruimte tussen de werkplaats en thuis. Het ruime interieur is geschikt voor 6 personen. Op dit moment is er nog geen commercialisering gepland.

Hyundai Ioniq
De Koreaanse constructeur heeft de Hyundai loniq ontwikkeld, die in normale omstandigheden zelfstandig kan rijden (autonomie van niveau 4). Het voertuig herkent verkeersborden, kan draaien, remmen of stoppen wanneer dat nodig is. Het is uitgerust met drie sensoriële lasers zodat een zicht van 180 graden mogelijk is, evenals met camera's en radars. De gegevens die worden verzameld door dit systeem, worden gecombineerd met die van een vooraf opgenomen 3D-kaart. Op basis van deze informatie kan de auto zich zeer nauwkeurig oriënteren op de weg. Het voertuig kan ook visuele elementen identificeren zoals markeringen op de grond. Dit voertuig is nog niet op de markt gebracht, want moet nog worden getest in stedelijke gebieden.

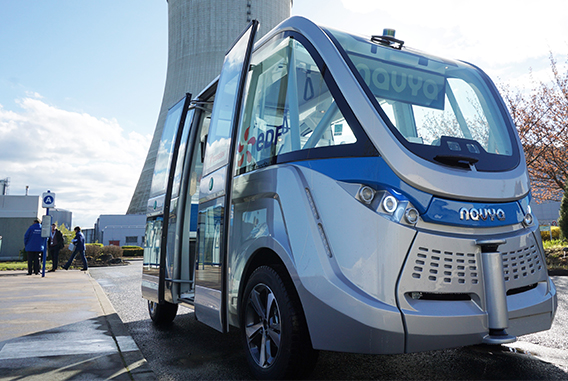
Navya Arma
De Navya Arma lijkt op een doos die kan rijden zonder chauffeur. Dit voertuig werd ontwikkeld door de Franse start-up Navya Technology. Het is geschikt voor maximaal 15 passagiers en kan een snelheid van 45 km/h halen. De eerste keer dat de Navya Arma op de weg komt, moet een bestuurder het voertuig manueel besturen zodat het het parcours kan integreren. Het idee van dit concept is vooral om een autonoom vervoermiddel te leveren voor gesloten sites waar verschillende gebouwen met elkaar verbonden zijn door privéwegen zoals luchthavens, industrieterreinen of campussen. Het voertuig is al operationeel in Zwitserland sinds 2015.
Delphi
De Audi Q5, op punt gesteld door Delphi Automotive, is een ander prototype van een zelfrijdende wagen die kan rijden zonder menselijke tussenkomst. Uitgerust met sensorische radars, laserradars en geavanceerde technologie kon dit voertuig bijna 5.500 km afleggen tussen San Francisco en New York in automatische modus gedurende 99% van de tijd. Een knappe prestatie! In tegenstelling tot de andere zelfrijdende auto's biedt deze Audi bovendien een ruime kofferbak.
